Q: How do Jetson, Raspberry Pi, and Digi CC93 compare for industrial applications?
A: Jetson performs well at AI and machine learning tasks because of its advanced GPU, whereas Raspberry Pi is great for education, prototyping, and general-purpose use. Digi CC93 offers industrial-grade reliability with strong IoT security and long-term support. In short, the best platform depends on the application type.
Q: What are the potential challenges to deploying Jetson in real-world projects?
A: Jetson deployments can throw up unexpected hardware and driver development issues, even some not documented by NVIDIA. Experienced teams like ByteSnap Design have overcome through hardware modifications and custom driver engineering to resolve system incompatibilities.
Q: What strategic business factors should you consider when choosing an embedded platform?
A: Beyond technical specifications, things to consider include total cost of ownership, requisite expertise, development infrastructure, certification needs, and long-term maintenance. These factors affect the true cost, timelines, and technical risk for industrial projects.
Q: When should you upskill on Jetson in-house versus outsourcing?
A: If you’re looking to maintain long-term product lines, it’s worth investing in some core and internal expertise. If you’re looking for a quick knowledge share, implementation support or risk mitigation, it’s worth outsourcing to an external specialist. This is particularly the case for highly technical areas such as custom hardware integration.
Introduction
For technical directors and CTOs making strategic platform decisions, balancing advanced AI capabilities against development complexity presents significant challenges.
Single-board computers (SBCs) have transformed embedded computing by providing compact, cost-effective platforms that can run full-featured operating systems like Linux.
However, configuring and compiling Linux for these platforms presents unique challenges and opportunities.
Each platform employs different hardware architectures, toolchains, and support structures that significantly impact the development experience.
Understanding these differences is crucial for developers when selecting the appropriate platform for their Linux-based embedded projects.
With industrial manufacturers increasingly integrating edge computing solutions, choosing between NVIDIA Jetson, Raspberry Pi, and Digi CC93 impacts not just technical specifications but your product roadmap, time-to-market, and long-term maintenance costs.
This comparison goes beyond technical specifications steer you through the business implications of each platform’s build environment. Drawing on ByteSnap’s experience, we’ll cover key decision factors that impact your development timeline, resource requirements, and product capabilities.
Contents

NVIDIA Jetson Platform
Overview
NVIDIA’s Jetson platform combines powerful ARM-based CPUs with NVIDIA’s GPU technology, making it well-suited for AI and machine learning applications. The platform includes several variants such as the Jetson Nano, Xavier NX, AGX Xavier, and Orin series, each with different performance capabilities.
Build Environment Pros
- Comprehensive Development Kit: NVIDIA provides JetPack SDK, an all-in-one solution that includes the Linux kernel sources, bootloader, CUDA toolkit, TensorRT, and various libraries optimized for AI workloads. This integrated approach simplifies the initial setup process significantly.
- Strong GPU Support: The build environment seamlessly integrates NVIDIA’s CUDA architecture, allowing developers to take full advantage of the GPU capabilities when compiling custom kernels and applications.
- Professional Documentation: NVIDIA offers extensive, well-maintained documentation with detailed guides for kernel configuration and compilation processes.
- BSP Completeness: The Board Support Package comes with pre-configured options for various use cases, reducing the need for extensive customisation when using standard features.
- Enterprise-grade Support: NVIDIA provides enterprise-level support and regular updates, making it suitable for commercial projects with long-term maintenance requirements.
Build Environment Cons
- Resource Intensive: The build environment requires substantial computational resources. Cross-compilation typically demands at least 16GB of RAM and significant disk space (>50GB) for a complete build environment.
- Proprietary Components: Many drivers and libraries are closed-source, limiting customization options and requiring acceptance of NVIDIA’s license agreements.
- Complex Configuration: The sophisticated nature of the platform makes kernel configuration more complex compared to simpler SBCs, with numerous Jetson-specific options to manage.
- Steep Learning Curve: Developers new to embedded Linux or NVIDIA’s ecosystem face a steeper learning curve due to the platform’s complexity and the integration of CUDA and AI components.
- Higher Host Requirements: Building for Jetson typically requires a more powerful development machine compared to other SBCs.
Case Study: Resolving Hardware Issues in NVIDIA’s Jetson Reference Design
Troubleshooting the Jetson module
When implementing Jetson platforms for industrial applications, even reference designs from major manufacturers can present unexpected challenges. A recent ByteSnap project with a sophisticated optical sensing solution illustrates how deep technical expertise proves essential regardless of platform pedigree.
The Challenge
The project design centred on a high-performance vision system using NVIDIA’s Jetson platform for complex image processing. The application demanded custom camera integration, requiring specialised driver development and precise hardware interfacing.
During implementation, we encountered a perplexing issue: despite following NVIDIA’s documented specifications precisely, the system consistently failed to properly interface with the custom camera hardware. Initial diagnostics pointed to a potential software driver issue, but after exhaustive testing, our engineering team suspected something more fundamental.
The Investigation
ByteSnap’s engineers conducted comprehensive component-level analysis of the Jetson hardware itself. Through systematic testing and circuit validation, we discovered something remarkable – the Jetson board’s actual hardware implementation differed from NVIDIA’s documented specifications. This discrepancy directly impacted the camera interface, preventing proper operation.
The Solution
Rather than waiting for a potential future correction from NVIDIA or compromising the project timeline, ByteSnap’s team developed an innovative hardware modification approach:
- We precisely identified the affected components on the Jetson board
- Carefully de-soldered the problematic components from the actual Jetson board
- Implemented a hardware correction to match the intended design specifications
- Verified the modification through comprehensive electrical testing
- Completed the custom camera driver development against the corrected hardware
This intervention restored the intended functionality and enabled the project to continue without compromising performance requirements.
Business Impact
This technical intervention delivered significant business value for our client:
- Prevented Schedule Slippage: Avoided an estimated 3-6 month delay waiting for potential board revision
- Market Timing: Maintained critical product launch window aligned with industry events
- Risk Mitigation: Established a validated approach for future production units
This case demonstrates why hardware expertise remains critical even when working with established platforms like Jetson. The ability to diagnose and resolve issues at the component level – rather than simply implementing software against assumed hardware specifications – can make the difference between project success and failure.
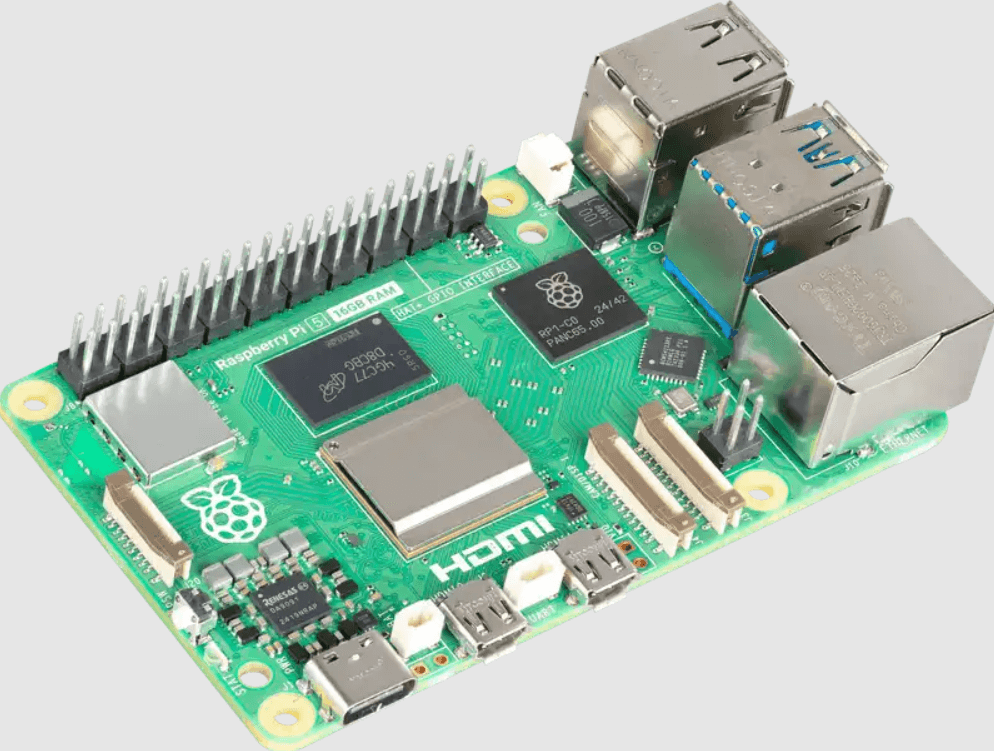
Raspberry Pi Platform
Overview
The Raspberry Pi is perhaps the most popular SBC globally, with multiple generations available from the original Pi to the latest Pi 5. It uses Broadcom SoCs with ARM architecture and has fostered an enormous community of both hobbyists and professional developers.
Build Environment Pros
- Simplicity and Accessibility: The build environment for Raspberry Pi is designed with accessibility in mind, making it ideal for beginners and educational settings. The Raspberry Pi Foundation provides a straightforward cross-compilation toolchain.
- Extensive Community Support: With millions of users worldwide, the community has created numerous guides, tutorials, and troubleshooting resources for virtually every aspect of building Linux for the Pi.
- Lightweight Requirements: Building for Raspberry Pi can be done on modest hardware, with lower RAM and storage requirements compared to more complex platforms.
- Standardization: The relative consistency across Pi generations means build environments and knowledge transfer well between different models.
- Open Source Focus: Almost all components of the build environment are open-source, allowing for transparent and customizable development processes.
Build Environment Cons
- Limited Hardware Acceleration: The build environment lacks robust support for GPU acceleration compared to the Jetson platform, making optimization for graphics-intensive applications more challenging.
- Binary Blobs: Despite its open-source focus, the Pi still requires some proprietary firmware blobs, particularly for the GPU, which complicates fully custom builds.
- Performance Limitations: The compilation process can be significantly slower on the Pi itself compared to cross-compilation, and even cross-compilation targets are limited by the hardware capabilities.
- Documentation Fragmentation: While abundant, documentation is scattered across official sources, wikis, forums, and blogs, sometimes leading to outdated or conflicting information.
- BSP Maintenance Gaps: The rapid release cycle of new Pi models occasionally leads to gaps in Board Support Package updates, requiring developers to adapt existing builds for new hardware.
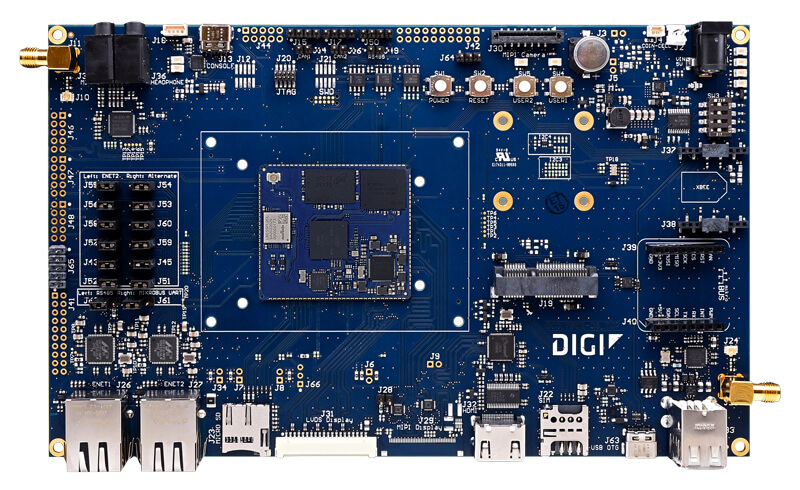
Digi ConnectCore 93 Platform
Overview
The Digi ConnectCore 93 is an industrial-grade SOM platform based on NXP i.MX 93 processors, featuring ARM Cortex-A55 cores. It’s designed for IoT applications with a focus on security, reliability, and low power consumption, it technically isn’t a SBC but a module that needs a carrier board, in this example the evaluation carrier board is what has been tested.
Build Environment Pros
- Yocto Project Integration: Digi provides a well-structured Yocto Project-based build environment, enabling highly customizable and reproducible Linux images with precise control over included components.
- Industrial Focus: The build environment includes options specifically designed for industrial applications, such as enhanced security features, long-term support configurations, and power management optimizations.
- Comprehensive BSP: Digi’s DEY (Digi Embedded Yocto) offers a mature Board Support Package with well-tested device drivers and middleware components.
- Security-Enhanced Options: The build system includes tools for secure boot configuration, encrypted storage, and trusted execution environment setup, which are critical for IoT deployments.
- Consistent Build Environment: The Yocto-based approach ensures consistent builds across different host systems, reducing “it works on my machine” problems.
Build Environment Cons
- Complexity of Yocto: The Yocto Project has a steep learning curve for newcomers, with its layer concept, bitbake build system, and metadata structure requiring significant time to master.
- Build Time: Initial builds can take several hours even on powerful development machines due to Yocto’s comprehensive approach to building the entire system from source.
- Limited Community Size: Compared to Raspberry Pi or even Jetson, the CC93 community is smaller, resulting in fewer community-contributed resources and examples.
- Commercial Focus: Some aspects of the platform’s documentation and support assume an enterprise context, making it less approachable for hobbyists or academic projects.
- Host System Requirements: A complete Yocto build environment for the CC93 typically requires substantial disk space (>100GB) and RAM (>16GB) for optimal performance.
Comparative Analysis
Development Experience
The three platforms offer distinctly different development experiences:
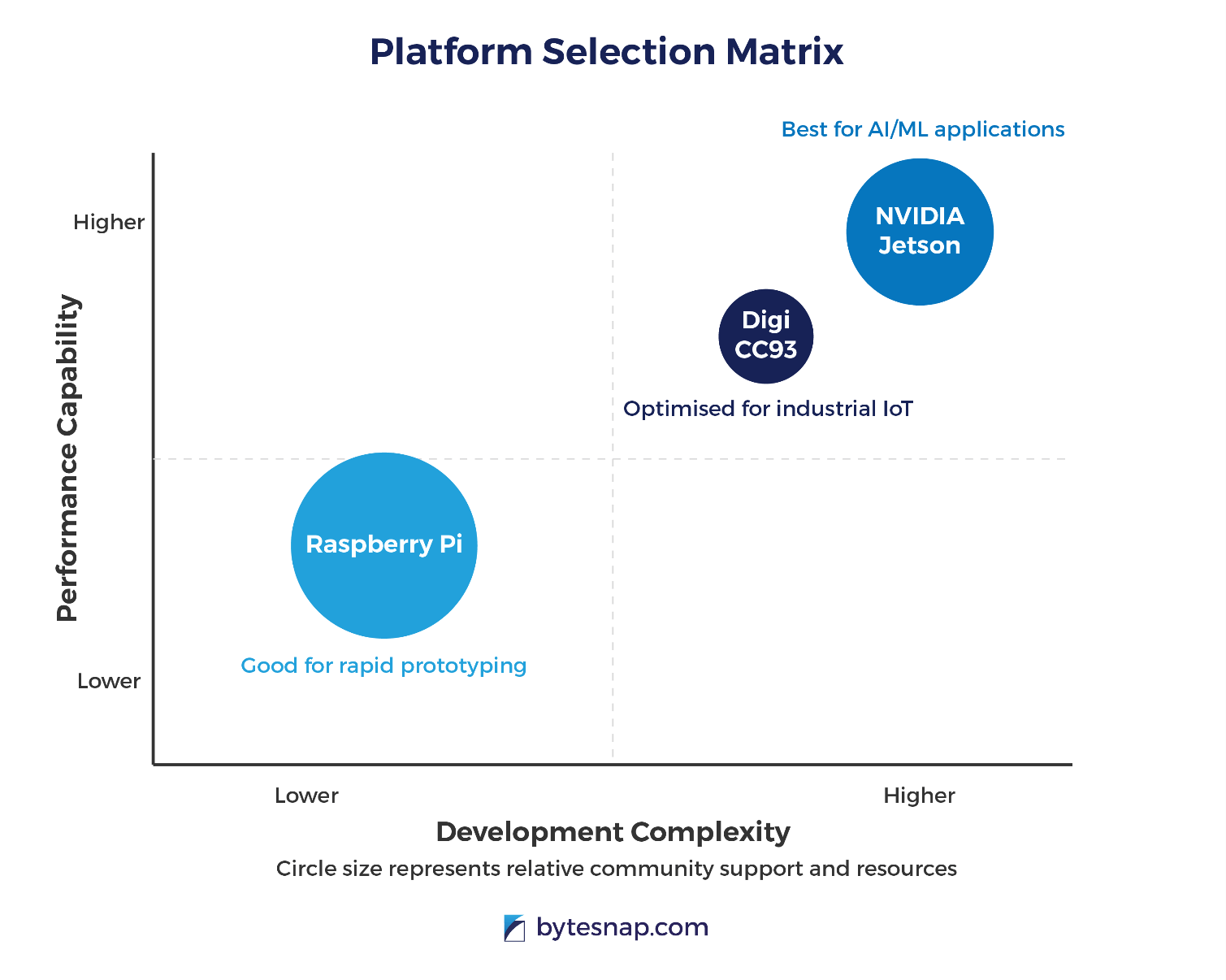
- NVIDIA Jetson provides a professional-grade environment optimized for AI/ML workloads with excellent GPU support but requires navigating some proprietary components.
- Raspberry Pi offers the most accessible experience with a gentle learning curve and vast community resources but with fewer industrial-grade features.
- Digi CC93 delivers an industrial-strength build environment through Yocto with excellent reproducibility and security features, but requires more specialised knowledge.
Performance Considerations
When configuring and compiling Linux kernels:
- Jetson build times benefit from powerful host machines and optimized toolchains but involve more components.
- Raspberry Pi builds are simpler but may require patience, especially when building on the Pi itself.
- CC93 builds through Yocto are comprehensive but have longer initial build times, though subsequent builds benefit from caching.
Strategic Business Considerations
When evaluating these platforms, technical teams must consider several factors beyond pure technical specifications to make decisions that align with broader business objectives.
Total Cost of Implementation
While the initial hardware costs may seem comparable across platforms, our experience shows the total implementation cost includes several often-overlooked factors:
- Specialised expertise acquisition: Either hiring or training developers familiar with CUDA and AI frameworks for Jetson development, or Yocto specialists for CC93
- Development infrastructure: Higher-powered build systems for Jetson and CC93 vs. more modest requirements for Raspberry Pi
- Certification and compliance: More complex systems typically require more extensive testing and certification processes, particularly in regulated industrial environments
- Integration complexity: The effort required to integrate with existing industrial systems varies significantly between platforms
SBC Linux Build Environment Comparison Matrix
A detailed side-by-side comparison to help you choose the optimal Single-Board Computer for your embedded Linux project.
| Key Differentiators | NVIDIA Jetson | Raspberry Pi | Digi ConnectCore 93 |
|---|---|---|---|
| Target Application | AI/ML workloads, computer vision, robotics | Educational, prototyping, hobbyist, general-purpose | Industrial IoT, secure embedded systems, low-power |
| CPU/GPU Architecture | ARM-based CPUs with NVIDIA GPUs (Maxwell, Orin) | Broadcom SoCs with ARM architecture (VideoCore GPU) | NXP i.MX 93 processors (ARM Cortex-A55 cores) |
| Typical RAM Requirements for Build Host | ≥ 16GB RAM, >50GB disk space | Lower RAM/storage requirements | ≥ 16GB RAM, >100GB disk space |
| Primary Build System/SDK | JetPack SDK (integrated solution) | Straightforward cross-compilation toolchain | Yocto Project (DEY - Digi Embedded Yocto) |
| Open Source Focus (vs. Proprietary) | Significant proprietary components (drivers, libraries) | Strong open-source focus, but some binary blobs | Open-source Yocto-based, highly customisable |
| Learning Curve (Ease of Use) | Steep (complexity, CUDA/AI integration) | Gentle (designed for accessibility) | Steep (Yocto Project's complexity) |
| Community Support Level | Professional documentation, enterprise support | Extensive global community, abundant resources | Smaller, commercially focused community |
| Enterprise Support Availability | Yes, enterprise-level support and regular updates | Primarily community-driven, limited formal enterprise support | Yes, commercial focus, assumes enterprise context |
| Key Security Features | Focus on AI security, proprietary components | Basic security, relies on open-source practices | Secure boot, encrypted storage, trusted execution environment |
| Initial Build Time | Benefits from powerful hosts, but many components | Simpler, but can be slow on-device; cross-compilation faster | Several hours (Yocto's comprehensive approach) |
| Presence of Proprietary Components | Many closed-source drivers/libraries | Some proprietary firmware blobs (e.g., GPU) | Minimal, primarily open-source Yocto-based |
| Ideal Use Case | High-performance AI/ML, commercial projects | Educational, rapid prototyping, cost-sensitive projects | Mission-critical industrial IoT, long-term deployments |
| General Cost Implications (Hardware/Development) | Higher hardware cost due to powerful GPU, resource-intensive development | Lower hardware cost, accessible for beginners, community support reduces development cost for simple projects | Higher hardware cost (industrial-grade), significant initial development investment due to Yocto complexity |
Time-to-Market Impact
Platform choice significantly impacts development timelines and can create competitive advantages or disadvantages:
- Jetson: Requires more upfront investment but dramatically accelerates AI feature development and deployment timeframes
- Raspberry Pi: Facilitates fastest initial prototyping but may necessitate platform migration for industrial deployment, creating potential delays
- CC93: Involves longer initial setup time but provides more predictable and streamlined development cycles, particularly valuable for regulated industries with certification requirements
Long-Term Maintenance Considerations
Your platform choice creates a technology commitment that impacts maintenance costs and product lifecycle management:
- Component lifecycle management: NVIDIA’s published roadmap provides clearer visibility for Jetson components, while Raspberry Pi’s consumer focus can create obsolescence challenges
- Security update implementation: Industrial platforms like CC93 offer more streamlined security patch processes, critical for deployments with extended lifecycles
- Expertise retention: Consider whether your team can maintain platform-specific knowledge long-term or if you’ll need ongoing external support
- Scalability: Evaluate how each platform supports scaling from prototype to production volumes, including supply chain considerations
Choosing Your Embedded Linux Powerhouse
A comparative analysis of the build environments for NVIDIA Jetson, Raspberry Pi, and Digi ConnectCore 93 to guide your next embedded project.
Platform Strengths at a Glance
This radar chart provides a high-level summary, comparing the platforms across key factors. Instantly see which SBC aligns best with your project's priorities, from raw AI power to industrial-grade reliability.
Learning Curve
The complexity and required expertise vary significantly. Jetson and CC93 demand specialised knowledge, while Raspberry Pi is built for accessibility.
Build Host RAM
Your development machine's power is a crucial factor. Professional platforms like Jetson and CC93 require significant resources for their complex build systems.
Support Model
Support structures range from vast, open-source communities to dedicated enterprise channels, impacting issue resolution and long-term viability.
Find the Right Tool for the Job
NVIDIA Jetson
Ideal for AI/ML & Robotics
The go-to choice for high-performance edge AI, computer vision, and autonomous machines. Leverages a powerful GPU and a comprehensive SDK (JetPack) for accelerated AI workloads.
Raspberry Pi
Ideal for Education & Prototyping
Perfect for learning, hobbyist projects, and rapid prototyping. Its accessibility, massive community, and straightforward build environment lower the barrier to entry for general-purpose computing.
Digi ConnectCore 93
Ideal for Industrial IoT
Built for mission-critical industrial applications that demand security, reliability, and long-term support. The Yocto-based build system allows for highly customised, reproducible, and secure Linux images.
The Developer's Journey: Build Process Overview
The path from source code to a bootable image differs significantly across platforms. Jetson offers an integrated suite, Pi provides flexibility, and CC93 delivers industrial-strength reproducibility through the powerful Yocto Project.
NVIDIA Jetson
Raspberry Pi
Digi ConnectCore 93
Risk Mitigation Strategies
Our experience implementing these platforms has identified several key risk mitigation strategies:
- Hybrid approach: Some clients successfully implement rapid prototyping on Raspberry Pi before migrating to industrial-grade platforms for production
- Modular architecture: Designing with clear hardware abstraction layers helps reduce the impact of potential platform changes
- Supplier relationships: Establishing direct relationships with silicon suppliers provides earlier visibility into roadmap changes
- External expertise: Partnering with specialists like ByteSnap can bridge knowledge gaps and accelerate implementation while reducing technical risk
Conclusion
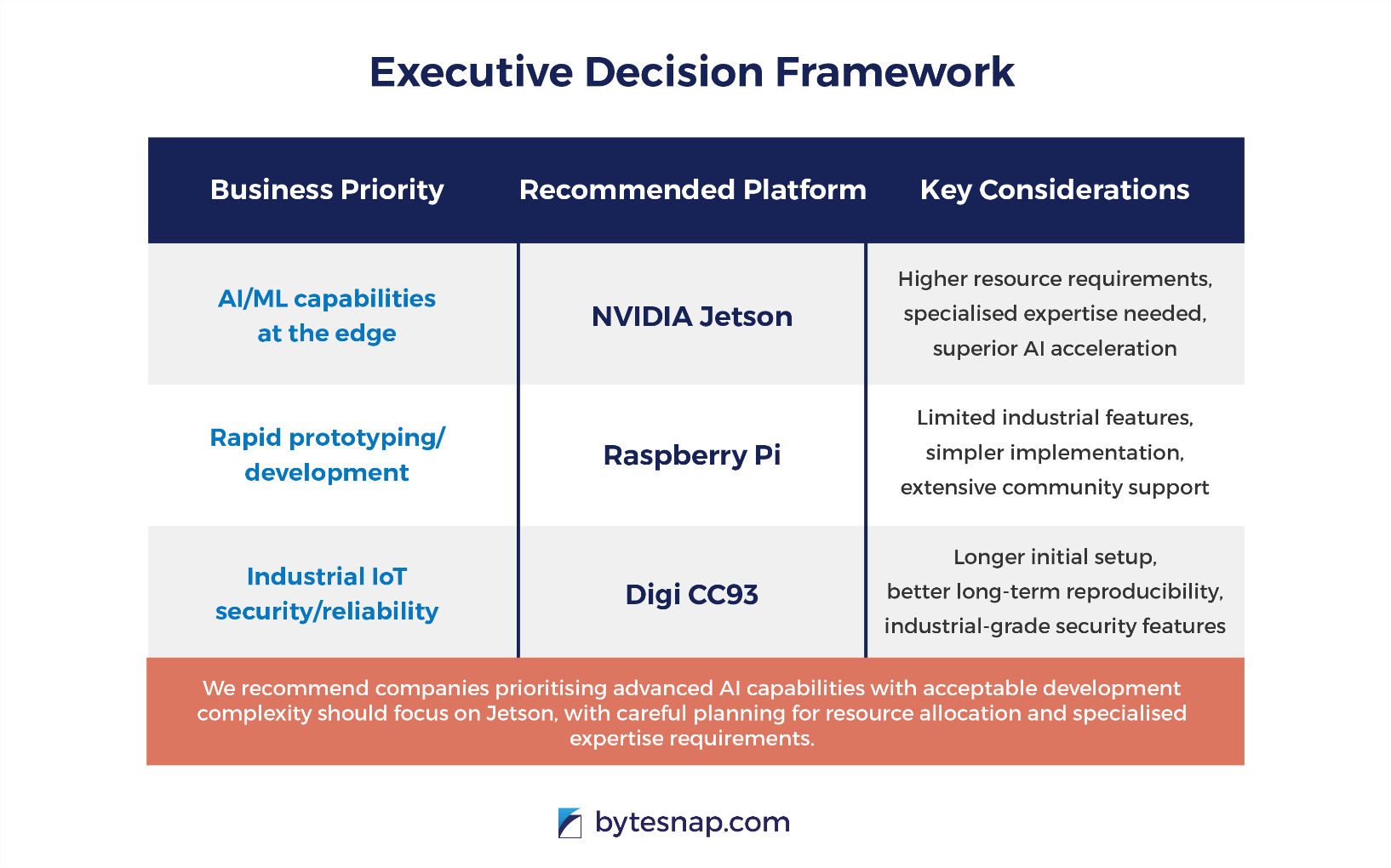
Selecting the appropriate SBC platform and its associated Linux build environment depends largely on project requirements:
- For AI/ML applications with GPU acceleration needs, NVIDIA Jetson offers the most comprehensive ecosystem despite its proprietary components and steeper learning curve.
- For educational, prototyping, or community-supported projects, Raspberry Pi provides the most accessible and widely documented build environment with reasonable performance for general-purpose applications.
- For industrial IoT deployments requiring security, reliability, and reproducible builds, Digi ConnectCore 93’s Yocto-based approach offers the most suitable foundation despite requiring more specialised knowledge and resources.
Each platform represents a different philosophy in embedded Linux development, from the accessibility-focused Raspberry Pi to the AI-optimised Jetson to the industrial-grade CC93.
Understanding these differences allows developers to select the most appropriate build environment for their specific needs and constraints, ultimately leading to more successful embedded Linux projects.
Next Steps for Your Platform Decision
FAQs
Q: How does Jetson's total cost of ownership compare to other platforms?
While Jetson’s initial hardware costs are moderate (£500-1000), the real investment lies in implementation effort (£20K-30K) and ongoing maintenance (£15K-25K). For AI/machine learning applications, this investment is typically justified by superior processing capabilities. However, for simpler industrial applications without AI requirements, platforms like Raspberry Pi may offer lower total costs despite potentially higher long-term maintenance needs.
Q: What development environment specifications do we need for Jetson development?
For productive Jetson development, we recommend:
- 16GB+ RAM (32GB preferred for larger projects)
- 50GB+ available storage
- Modern multi-core processor
- Linux-based host OS (Ubuntu LTS recommended)
ByteSnap’s containerised build environments can reduce these requirements while improving build reproducibility across development teams.
Q: How long does a typical Jetson implementation take from start to deployment?
A typical industrial Jetson implementation follows this timeline:
- Environment setup: 1 week
- Initial build and testing: 1 week
- Custom driver development: 2-4 weeks (varies significantly based on peripheral requirements)
- Application porting: 2-3 weeks
- Testing and optimisation: 2-3 weeks
- Deployment preparation: 1 week
Total timeline: 8-12 weeks for a complete implementation, though initial prototypes can be available much earlier.
Q: When should we choose Jetson over Raspberry Pi for industrial applications?
Choose Jetson when:
- AI/machine learning capabilities are central to your application
- You need significant GPU acceleration for image processing or computer vision
- Your application requires higher processing power in a compact form factor
- Long-term roadmap alignment with NVIDIA’s ecosystem is strategically valuable
Raspberry Pi remains better suited for simpler control applications, rapid prototyping, or when budget constraints are paramount.
Q: What are the most common pitfalls in Jetson implementation projects?
The most frequent challenges we encounter include:
- Underestimating custom driver development complexity, especially for non-standard cameras or sensors
- Insufficient thermal management consideration in enclosure design
- Power consumption exceeding initial estimates when GPU is fully utilised
- Inadequate testing under various load conditions
- Relying too heavily on community support for industrial-specific modifications
Our experience with Jetson hardware has even involved correcting design issues in NVIDIA’s own reference hardware, highlighting the importance of working with experienced implementation partners.
Q: How can we maintain expertise for Jetson-based products long-term?
Maintaining Jetson expertise requires a multi-faceted approach:
- Document all custom development thoroughly, including design decisions
- Implement containerised build environments to ensure reproducibility
- Establish knowledge transfer protocols between external partners and internal teams
- Invest in selective training for key team members
- Consider a hybrid support model where specialised partners provide ongoing technical backup
ByteSnap offers flexible support agreements specifically designed to address this challenge for industrial manufacturers.

ByteSnap Design co-founder Graeme Wintle is one of the UK’s most experienced Microsoft Windows CE developers and is highly sought after for his expertise in migrating and security operating systems.
After graduating in Software Engineering from Newcastle University, Graeme quickly distinguished himself in software development at Nokia, GST Technology and Intrinsyc.
Graeme has been helping companies around the world with embedded software development for over twenty years. His cutting-edge design work has been instrumental in establishing ByteSnap at the forefront of embedded system design.
Graeme is the inventor of powerful, flexible user interface development framework, SnapUI.